Main information about the thesis :
Thesis start : September 2013
Thesis defense date: : 16th December 2016
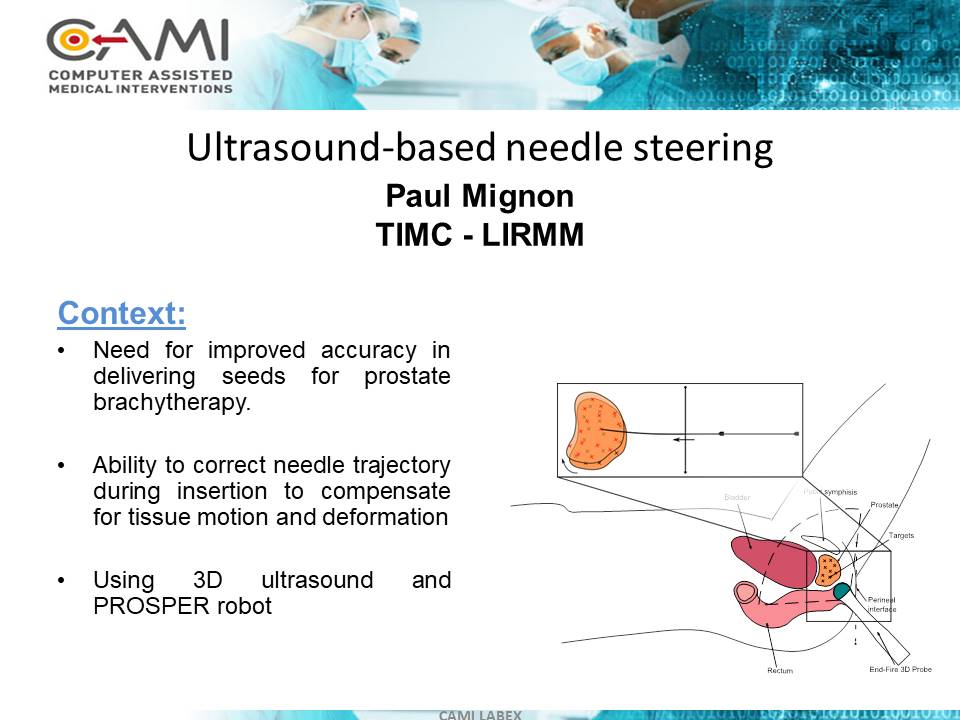
Title (in French) : Guidage robotisée d’une aiguille flexible sous échographie 3D pour la curiethérapie de la prostate
Associated laboratory: TIMC-IMAG laboratory, Grenoble.
In collaboration with LIRMM laboratory, Montpellier.
Funded by the labex CAMI
The thesis manuscript is downloadable (in french) here
Thesis poster:
PhD main scientific communications :
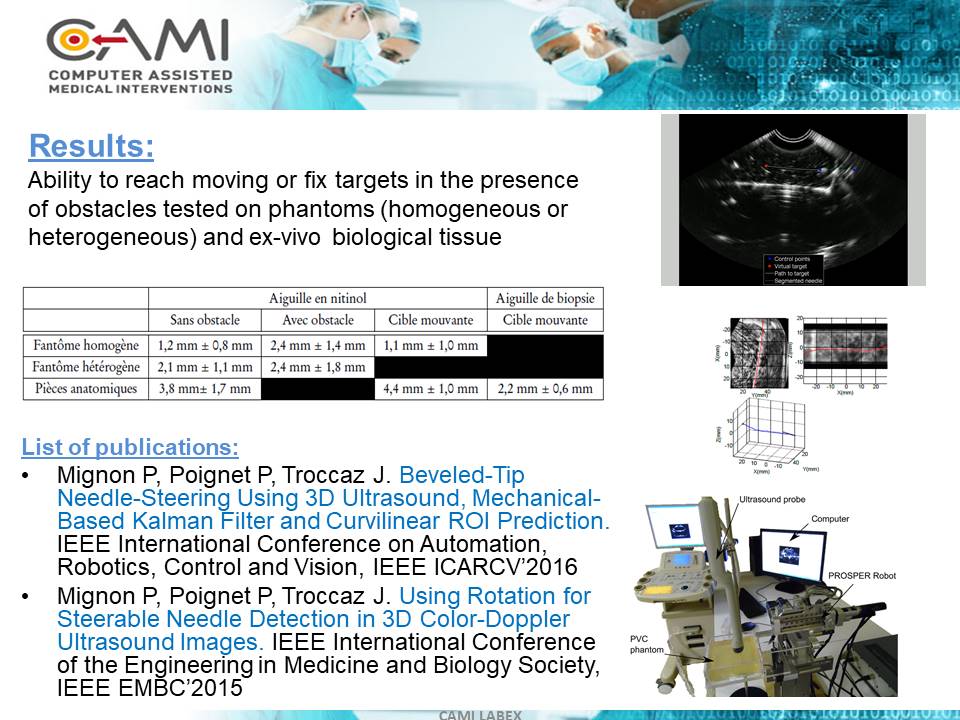
- Mignon P, Poignet P, Troccaz J. Beveled-Tip Needle-Steering Using 3D Ultrasound, Mechanical-Based Kalman Filter and Curvilinear ROI Prediction. Proceedings of IEEE International Conference on Automation, Robotics, Control and Vision, IEEE ICARCV’2016, Phuket, Thailand, 13-15 Novembre 2016 – cf. http://hal.univ-grenoble-alpes.fr/hal-01455325/document
- Mignon P, Poignet P, Troccaz J. Using Rotation for Steerable Needle Detection in 3D Color-Doppler Ultrasound Images. Proceedings of IEEE International conference in Engineering in Medicine and Biology, IEEE EMBC’2015, pp1544-1547, Milano, 25-29 Aout 2015 – cf. https://hal.archives-ouvertes.fr/hal-01218787/document