Main information about the thesis :
Thesis start : October 2012
Thesis defense date : 14 October 2016
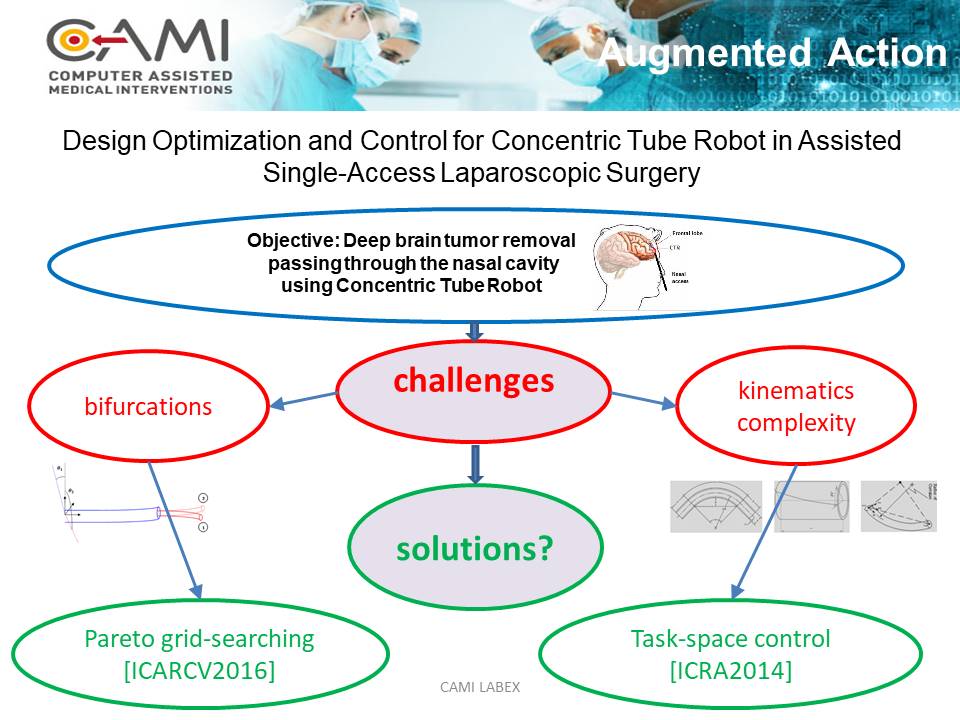
Title : Design Optimization and Control for Concentric Tube Robot in Assisted Single-Access Laparoscopic Surgery
Associated laboratory : LIRMM, Montpellier
In collaboration with ICUBE laboratory, Strasbourg
Funded by the labex CAMI
The complete thesis manuscript is downloadable here
Thesis poster:
PhD main scientific publications :
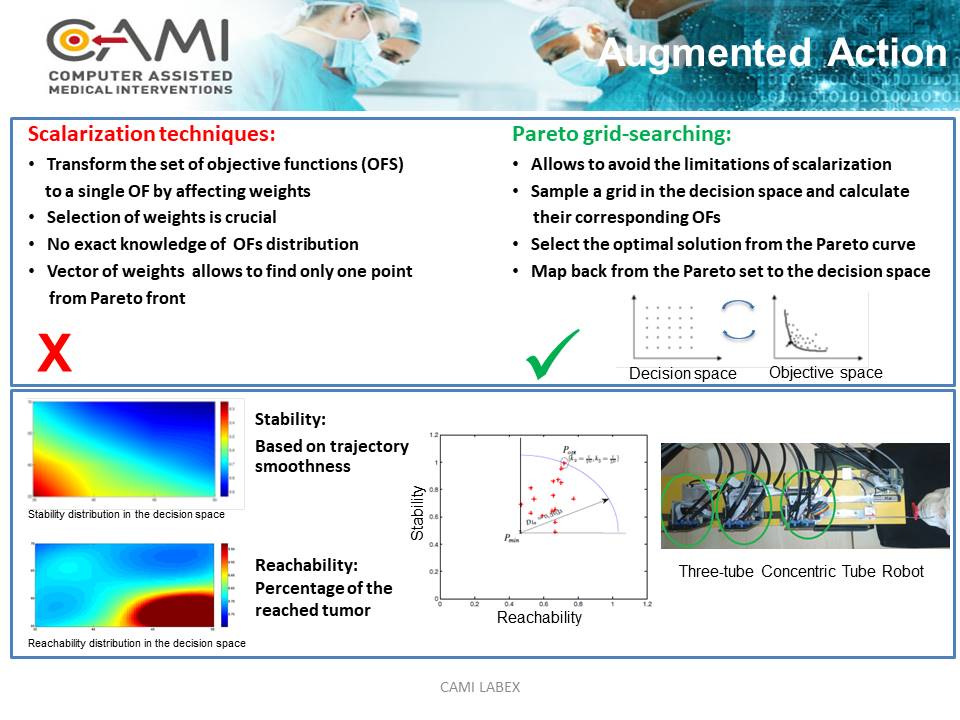
- Boushaki, C. Liu, B. Herman, V. Trevillot, M. Akkari and P. Poignet, “Optimization of Concentric-Tube Robot Design for Deep Anterior Brain Tumor Surgery”, in the proceedings of the 13th International Conference on Control, Automation, Robotics and Vision (ICARCV’14), Thailand , Nov. 2016
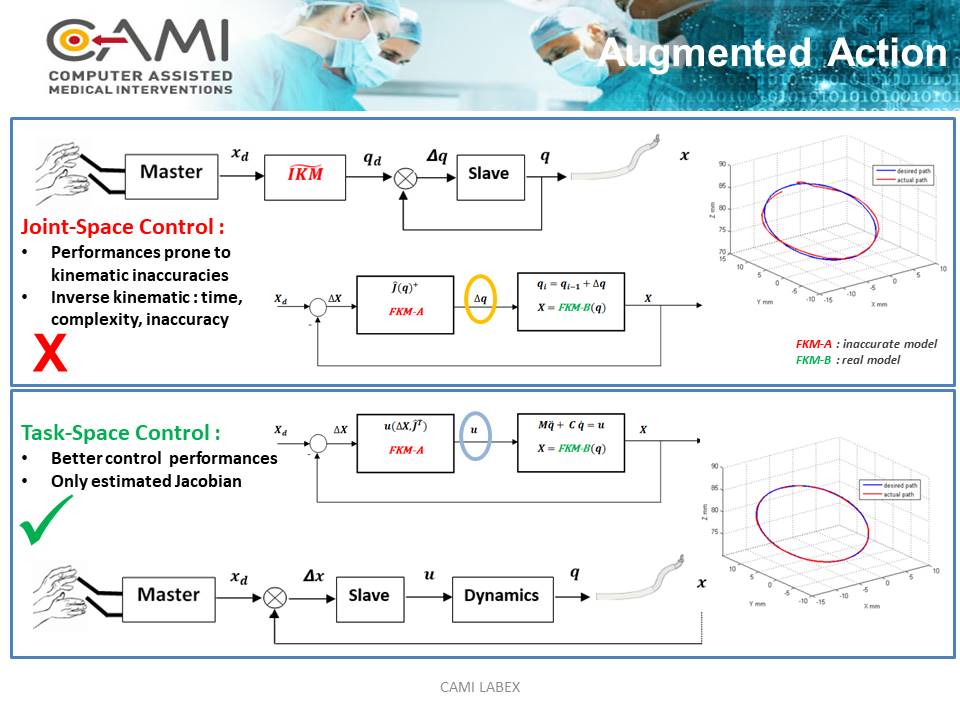
- MN Boushaki, C Liu, P Poignet, Task-space position control of concentric-tube robot with inaccurate kinematics using approximate Jacobian. IEEE International Conference on Robotics and Automation (ICRA), 2014, 5877-5882
- M. Boushaki, M. T. Chikhaoui, K. Rabenorosoa, C. Liu, N. Andreff and P. Poignet, “Conception, modélisation et commande des robots à tubes concentriques : vers des applications médicales”, Techniques de l’Ingénieur: Conception, modélisation et commande en robotique (in French), Vol. TIB398DUO, pp. 1-29, May 2016.Workshop national
- MN Boushaki, C Liu, V Trevillot, P Poignet, Endonasal Endoscopic Approach for Deep Brain Tumors Using Concentric Tube Robot.In Proc. of SURGETICA 2014