Objectives, context, general presentation
This action concerned the clinical transfer of two puncture robots under imaging. One, PROSPER, for brachytherapy of the prostate is guided by 3D ultrasound imaging; the other, the LPR, is scanner and MRI compatible. At the end of Nikolai HUNGR’s thesis (see https://hal.archives-ouvertes.fr/te l-00997017/document), these two systems were operational and had been validated on a technical level and first tests on anatomical piece for one of them. But none of these prototypes could be used clinically. New versions were being developed thanks to ANR funding via the robotex equipex and the Robacus project. Labex CAMI took over the salary of a medical robotics specialist to bring these devices to their clinical evaluation.
Results
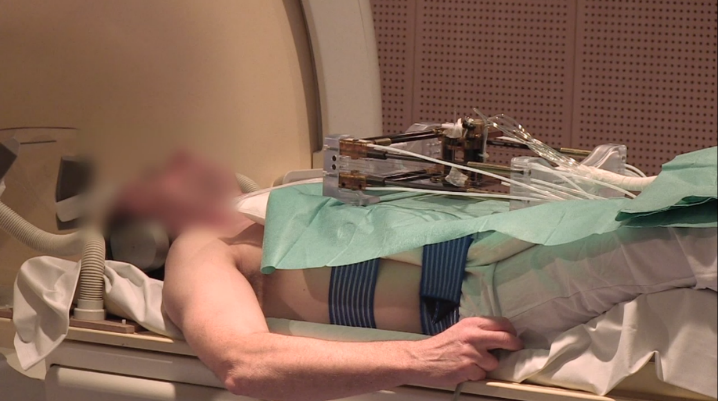
The LPR was involved in a preclinical evaluation in collaboration with the CIC-IT and the University Hospital of Grenoble. The purpose of this evaluation was to test the capabilities of this robot under clinical conditions. The system was thus tested, under MRI, on 20 healthy volunteers, the goal being to validate the positioning of a needle (without insertion) with respect to a trajectory defined by the radiologist on the MRI images. This study has shown very promising results, the robot to position the needle with an error less than 5 mm in 72% of cases, for a target at 10 cm deep.
Regarding PROSPER robot, laboratory tests of the new prototype have been successfully completed. Modifications of the robot must still take place to guarantee the Electro-Magnetic Compatibility (EMC) of the device. The clinical protocol for clinical feasibility has been prepared in collaboration with the clinical teams of the CHU Grenoble and should be submitted shortly to the regulatory authorities.
 |
 |
| LPR positioning ability tested uring preclinical evaluation on healthy volunteers. | Testing the set-up of the clinical prototype of PROSPER in the Operating Room. |
Related publications
HUNGR, Nikolai, BRICAULT, Ivan, CINQUIN, Philippe, et al. Design and Validation of a CT-and MRI-Guided Robot for Percutaneous Needle Procedures. IEEE Transactions on Robotics, 2016, vol. 32, no 4, p. 973-987.
VERON, B., HUNGR, N., et TROCCAZ, Jocelyne. Making a clinical device from a laboratory prototype: from Prosper to Prosper OR. In : 6th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery. 2016.
VERON, B., LENFANT, J., HUNGR, N., CHIPON, E., GHELFI, J., MOREAU-GAUDRY, A., BRICAULT, I. and FOUARD, C. LPR : first preclinical human trials. Surgetica 2017, Strasbourg, France
GHELFI, J., MOREAU-GAUDRY, A., HUNGR, N., et al. Evaluation of the Needle Positioning Accuracy of a Light Puncture Robot Under MRI Guidance: Results of a Clinical Trial on Healthy Volunteers. Cardiovascular and interventional radiology, 2018, p. 1-8.
Scientific public events related to this action
Public video communication about the preclinical LPR robot study – in French (cf. http://www.universcience.tv/video-robacus-un-robot-dans-l-irm-8094.html ).