Main information about the thesis :
Thesis start : November 2015
Thesis defense date: 30th September 2019
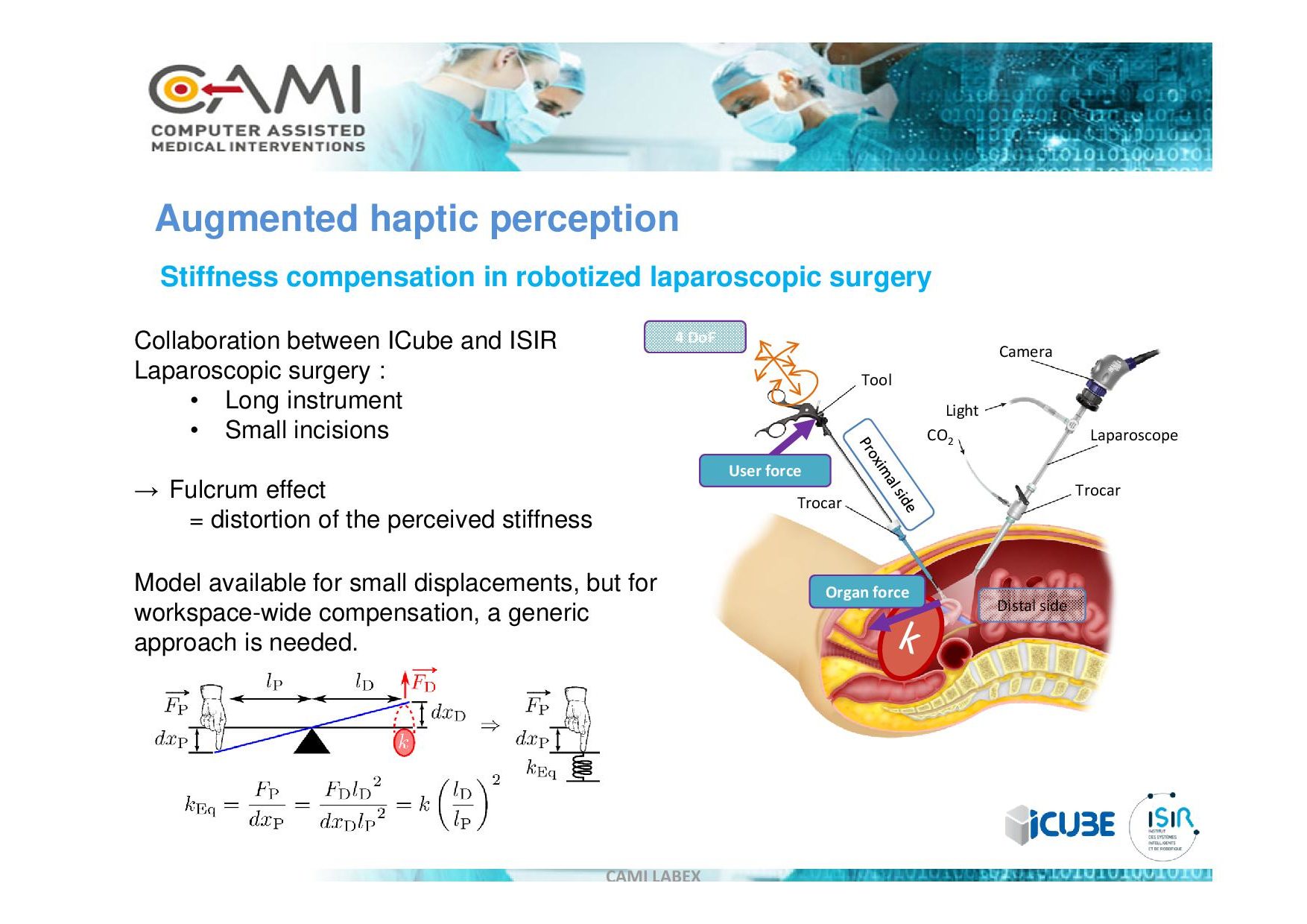
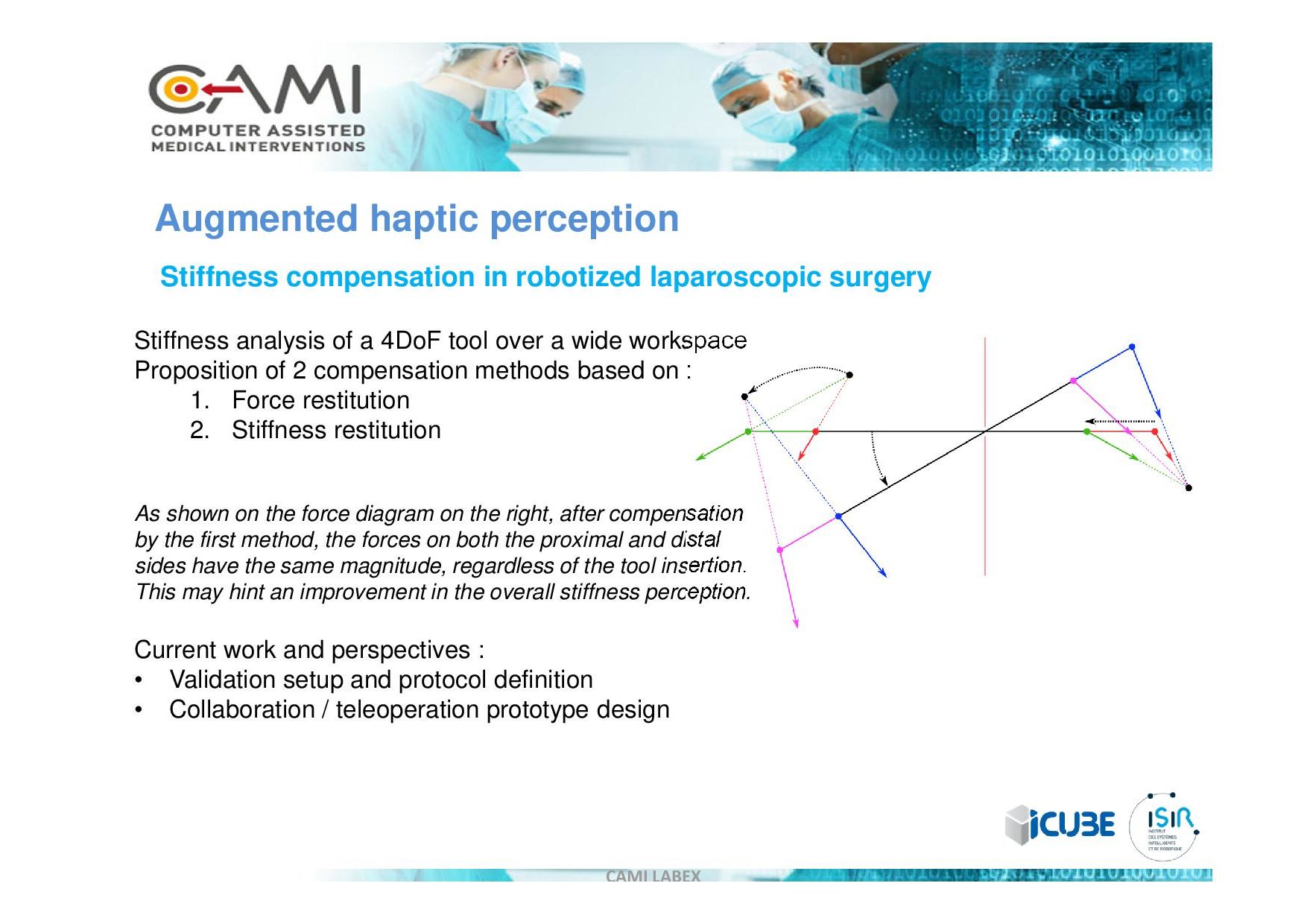
Title: Méthodes et procédés pour l’assistance à la chirurgie laparoscopique par comanipulation
Associated laboratory: ICUBE, Strasbourg
In collaboration with ISIR laboratory, Paris.
Co-funded by CAMI labex and the Alsace region.
The thesis manuscript is downloadable (in french) here
Thesis poster:
PhD main scientific communications :
- F. Schmitt, O. Piccin, L. Barbé, B. Bayle. Soft robots manufacturing: a review, Frontiers in Robotics and AI, Frontiers Research Foundation, Vol. 5:84, juillet 2018. cf. https://www.frontiersin.org/articles/10.3389/frobt.2018.00084/full
- F. Schmitt, O. Piccin, L. Barbé, B. Bayle. An Origami-Inspired Flexible Pneumatic Actuator, dans 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 436-441, Madrid, Spain, octobre 2018. cf. https://ieeexplore.ieee.org/document/8593423
- Schmitt, François and Sulub, Josue and Avellino, Ignacio and Da Silva, Jimmy and Barbé, Laurent and Piccin, Olivier and Bayle, Bernard and Morel, Guillaume (2019). Using Comanipulation with Active Force Feedback to Undistort Stiffness Perception in Laparoscopy. 2019 International Conference on Robotics and Automation (ICRA). Pages 3902-3908. cf. https://hal.archives-ouvertes.fr/hal-02343485
- Schmitt, J. Sulub, I. Avellino, J. Da Silva, L. Barbé, O. Piccin, B. Bayle, G. Morel. Using comanipulation with active force feedback to undistort stiffness perception in laparoscopy, dans 2019 IEEE International Conference on Robotics and Automation (ICRA), Montréal, Canada, mai 2019. cf. https://ieeexplore.ieee.org/document/8793662
1 thought on “François SCHMITT”
Comments are closed.