New Interfaces for minimally invasive surgery: allow each surgeon to operate through laparoscopy as easily as through laparotomy.
Coordinator: Marie-Aude VITRANI – ISIR Institut des Systèmes Intelligents et de Robotique
Other CAMI Partners: Icube, LIRMM
Started: July 1st 2017
Motivations and objectives:
Operating rooms integrate more and more technical devices: imaging, navigation, instruments (bipolar, monopolar, ultrasound, laser, etc.), robotics, etc.
During laparoscopic procedures, the installation of the various devices plus the constraints related to the uses of trocars have a considerable impact on the surgeon’s skills:
The posture of the surgeon is uncomfortable and leads to postural fatigue.
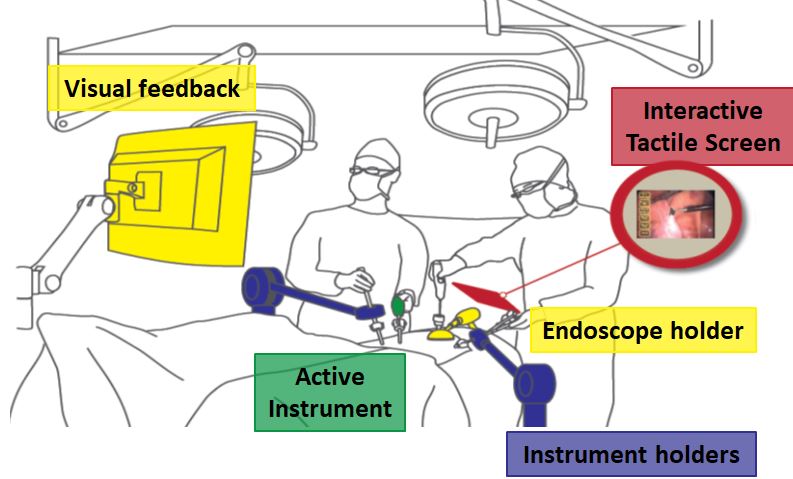
Visual space (screen) and manipulation space (instruments) are disjointed making hand-eye coordination difficult.
The insertion of instruments through trocars induces a well-known phenomenon of “fulcrum effect” in the transmission of movements. An equivalent phenomenon occurs for effort and becomes crucial for force feedback devices.
The perception of depth is degraded.
As a result, minimally invasive surgery is underused in clinical practice despite its undeniable medical benefits over open surgery. In this project, we propose to work to facilitate gestures in minimally invasive surgery by addressing more particularly the questions of interfaces and human-machine interactions.
Concept: sensorimotor facilitation
The concept of sensorimotor facilitator aims to facilitate laparoscopic surgery. We mean to increase the performance of the surgical gesture while reducing the cognitive and physical load.
The main idea is to optimize interactions between devices and practitioners. This involves designing and implementing new adaptive functions that integrate the visuo-motor coordination schemes and the surgeon’s learning patterns.
More and more technical devices into the OR
The project is divided into the following work packages:
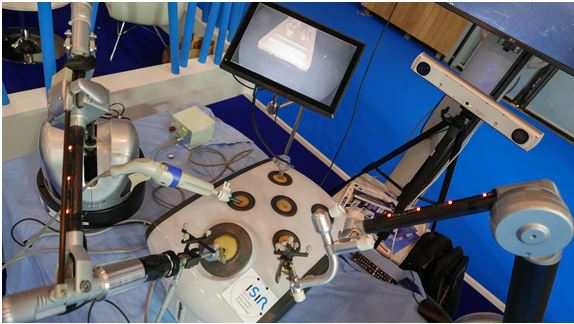
Cobots to hold instruments and endoscope
Tangible interfaces and augmented reality
Time Shifting and Video On Demand
Human-Machine Interface for the Control of Multi-functions system
Learning analytics and evaluation protocols
Clinical validation (mainly digestive surgery and gynaecological surgery)
Main results and on-going work:
The level of development of the surgical cockpit devices varied greatly. First, active instruments were transferred to an industrial partner (Endocontrol). Second, the laparoscopic instrument holders were designed and tested by surgeons during preliminary animal trials, taking into account aspects of visualization and Human–Computer Interaction, leading to an industrial transfer to Moon Surgical (previously MastOR).
The project successfully validated various modules on experimental laboratory benches (in vitro) by surgeons, and also on anatomical subjects (in cadavero) or on animals (in vivo). After industrial transfer, clinical validations on patients were conducted and medical benefit analyzes are ready to be conducted.
Main Publications
Jesus Mago, François Louveau, Marie-Aude Vitrani (2021). Fall detection for robotic endoscope holders in Minimally Invasive Surgery. IROS 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems.
Lin Dong, Guillaume Morel, Control Strategy at Different Instrument Points Using Lever Model in Laparoscopic Surgery, IEEE ICARM 2021, Best student paper finalist.
De Turenne A, Szewczyk J, Eugene F, Le Bras A, Blanc R, Haigron P.Statistical shape model of vessel centerline for endovascular paths comparison in mechanical thrombectomy. Annual International Conference of the IEEE Engineering in Medicine and Biology Society. 2021; pp. 1765-1769.
Chalard, R. and Reversat,D. and Morel,G. and Vitrani,M.-A. (2020). Fast and accurate intracorporeal targeting through an anatomical orifice exhibiting unknown behavior. International Conference on Robotics and Automation (ICRA). Pages 1-6
Avellino, Ignacio and Bailly, Gilles and Canlorbe, Geoffroy and Belghiti, Jérémie and Morel, Guillaume and Vitrani, Marie-Aude (2019). Impacts of Telemanipulation in Robotic Assisted Surgery. Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems. Pages Paper No.: 583. New York, NY, USA.
Anne Yang, Jérôme Szewczyk. Tracking the 3D Shape of Steerable Catheters with Helical Markers, Engineering in Medicine and Biology Conference, Oct 2019, Berlin, Germany
Schmitt, François and Sulub, Josue and Avellino, Ignacio and Da Silva, Jimmy and Barbé, Laurent and Piccin, Olivier and Bayle, Bernard and Morel, Guillaume (2019). Using Comanipulation with Active Force Feedback to Undistort Stiffness Perception in Laparoscopy. 2019 International Conference on Robotics and Automation (ICRA). Pages 3902-3908.
Arico, Mario and Joseph, Lucas and Da Silva, Jimmy and Avellino, Ignacio and Mago, Jesus and Gauthier, Philippe and Ferrier-Barbut, Eleonore and Morel, Guillaume and Vitrani, Marie-Aude (2019). A Surgical Cockpit for Minimally Invasive Surgery.
Yang, J. Szewczyk.Marker-Assisted Image-Based 3D Monitoring for Active Catheterss, The Hamlyn Symposium on Medical Robotics, Jun 2019, London, United Kingdom
Benoit, C. Hughes, D. Andreoli, A. Jaffard, A. C. Boccara, R. Pailhe, S. Voros, A. Moreau-Gaudry, “Feasibility of FFOCT endomicroscope for cartilage evaluation”, Proc. SPIE 10470, Endoscopic Microscopy XIII, 104700L (14 March 2018);
C. Rouchy, A. Moreau-Gaudry, E. Chipon, S. Aubry, L. Pazart, et al..Evaluation of the clinical benefit of an electromagnetic navigation system for CT-guided interventional radiology procedures in the thoraco-abdominal region compared with conventional CT guidance (CTNAV II): study protocol for a randomised controlled trial. Trials, BioMed Central, 2017, 18 (1), pp.306.
Joseph, Lucas and Padois, Vincent and Morel, Guillaume (2018). Towards X-ray medical imaging with robots in the open: safety without compromising performances.
Chalard,R. and Reversat,D. and Morel,G. and Vitrani,M.-A. (2018). AUTOFocus: Reaching a target in the prostate with a 3D-ultrasound image-based control law. The Hamlyn Symposium on medical robotics. Pages 1-3.
Vitrani, MA (2018). A Surgical Cockpit to ease laparoscopic surgery. Medical Robotics days. Brussels, Belgium. Communication invitée.
Ferrier-Barbut, E. (2018). Quels changements dans l’apprentissage en chirurgie par cœlioscopie avec l’arrivée des assistances robotisées ?.
Avellino, I. (2018). Événements Indésirables de la Chirurgie Robot-Assisté. Workshop: Le robot chirurgical : Quelles approches interprofessionnelles techniques et non techniques? https://wrobot-cerefige.event.univ-lorraine.fr/
Chalard, R. and Reversat,D. and Morel,G. and Mozer, P. and Vitrani, M.-A. (2018). Precisely positioning the tip of an instrument inserted through an orifice with a free wrist robot. Application to prostate biopsies.
IJCARS. Vol 13 Pages 1-8. Best paper award – runner-up.
Vitrani, M.-A. and Poquet Torterotot, C. and Morel, G. (2017). Applying virtual fixtures to the distal end of a minimally invasive surgery instrument.
IEEE Transactions on Robotics. Vol 33 No 1 Pages 114-123.
Candalh-Touta, N. and Szewczyk, J. (2017). How can we improve the Training of Laparoscopic Surgery thanks to the Knowledge in Robotics?.
15th International Conference on Education and Information Systems, Technologies and Applications. Pages pp.137.
Candalh-Touta, N. and Szewczyk, J. (2017). Is proprioception a key sensory modality to be successful in laparoscopy training?.
Computer Assisted Radiology and Surgery (CARS). Pages pp.S132.



1 thought on “Surgical Cockpit ”
Comments are closed.